








Salutare! Sunt Oana de la Bitmi.ro și astazi vreau sa iti arat cum poti construi un mic sistem de scanare cu un servomotor, un senzor ultrasonic US-100 si un laser, folosind Arduino. Este un proiect foarte distractiv si util, mai ales daca vrei sa inveti cum functioneaza senzorii cu ultrasunete si cum poti controla un servomotoarele pentru a cauta si detecta obstacole.
Sistemul este gandit astfel incat servomotorul sa se miste lin stanga-dreapta, iar atunci cand detecteaza un obstacol apropiat (sub 20 cm), servomotorul se opreste, laserul se aprinde pentru o secunda, apoi miscarea continua. Astfel, vei putea vedea cum senzorul masoara distantele in timp real si cum Arduino reactioneaza automat la obstacole.
Despre senzorul ultrasonic US-100
Senzorul ultrasonic US-100 masoara distantele folosind ultrasunete. In acest proiect folosim modul UART, ceea ce inseamna ca Arduino primeste direct masuratoarea de la senzor printr-o conexiune seriala simpla. US-100 trimite distantele in milimetri, iar Arduino le converteste in centimetri si decide daca trebuie sa opreasca servomotorul si sa aprinda laserul.
Senzorul poate functiona in doua moduri, dar pentru acest proiect modul UART este cel mai usor de utilizat. Trimite o comanda placii de dezvoltare, care primeste imediat raspunsul cu distanta detectata.
Despre modul dioda laser KY-008
Modulul KY-008 este o dioda laser rosu de 5V, simplu de controlat cu Arduino. Cand senzorul ultrasonic detecteaza un obstacol, placa Arduino aprinde laserul KY-008 pentru o scurta perioada, oferind un feedback vizual imediat. Este ideal pentru proiecte de scanare, orientare sau indicare a pozitiei unui obiect.
Modulul contine un LED laser cu lentila integrata si un pin de alimentare (VCC, GND) si un pin de control digital, care poate fi conectat direct la un pin Arduino.
Componente necesare
1 x Placa de dezvoltare compatibila Arduino R4 WiFi
1 x Servomotor SG90
1 x Senzor ultrasonic US-100
1 x Modul dioda laser 650nm KY-008
1 x Breadboard 830 puncte
7 Fire tata - mama
5 Fire tata - tata
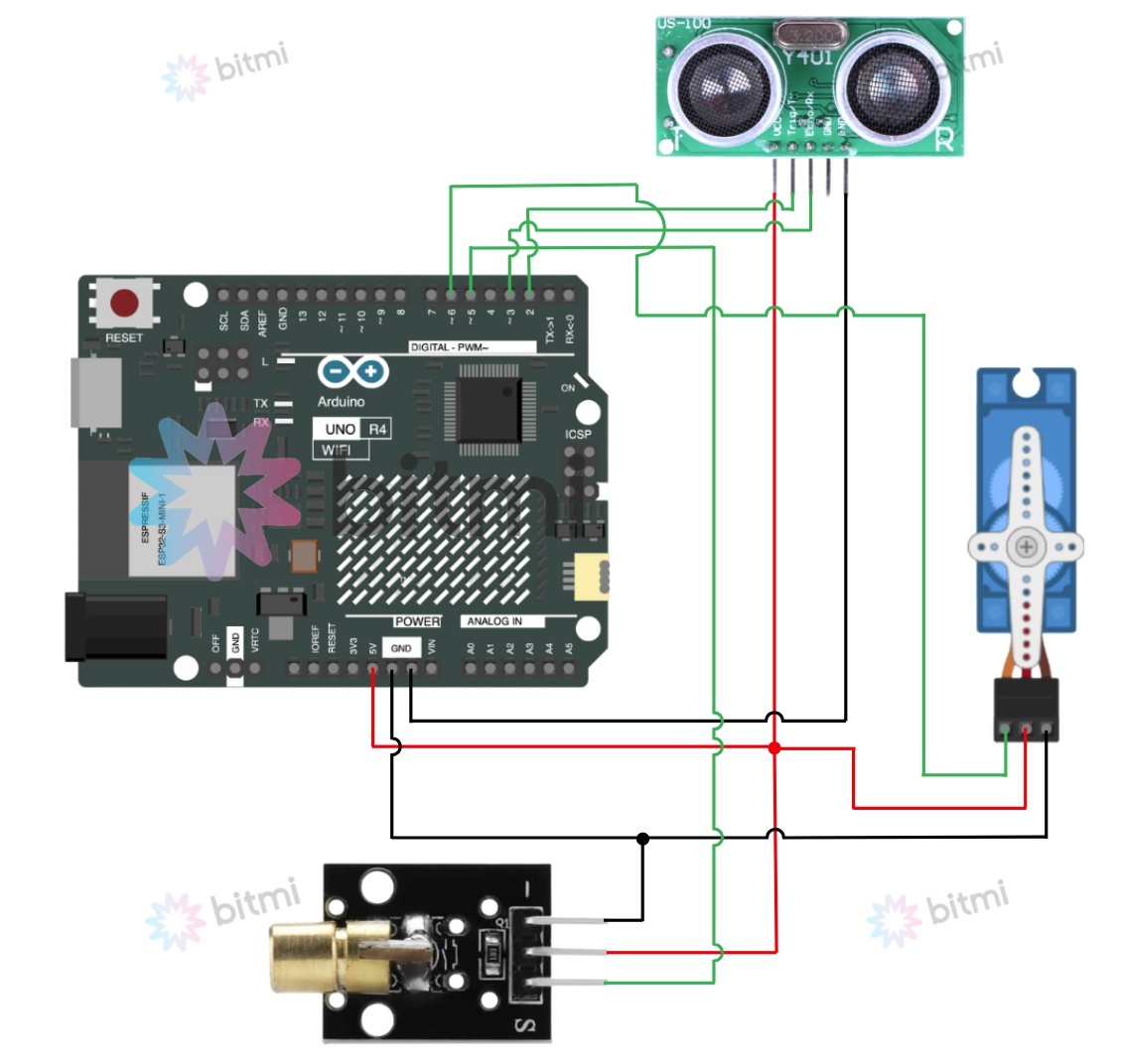
Schema de conectare
Cod sursa
Dupa ce ai realizat circuitul, e timpul sa introduci codul sursa, pentru a descarca codul sursa clic AICI.
Conecteaza placa de dezvoltare compatibila Arduino Uno R4 la computer folosind portul USB. Apoi, mergi la meniul Tools si selecteaza tipul de placa si portul serial pe care il folosesti (optiunile Board si Port).
Pentru acest proiect este necesar sa instalezi libraria Adafruit PWM Servo Driver Library. Toate librariile se instaleaza rapid prin Library Manager din Arduino IDE: accesezi meniul Sketch > Include Library > Manage Libraries, tastezi numele fiecarei librarii si apesi butonul Install.
Dupa instalarea librariilor si introducerea codului, apasa butonul Upload (sageata spre dreapta). In partea de jos a ferestrei Arduino IDE vei putea urmari mesajele de stare: Compiling Sketch, Uploading si Done. Daca incarcarea s-a finalizat cu succes, Arduino va incepe imediat sa ruleze codul, iar proiectul tau este gata pentru testare.
Cum functioneaza proiectul
Odata pornit, Arduino trimite comanda senzorului US-100 si citeste continuu distantele detectate. Servomotorul se misca lin stanga-dreapta, scanand zona. La fiecare pas, codul verifica daca un obstacol se afla la mai putin de 20 cm.
Daca obstacolul este detectat, servomotorul se opreste temporar, iar modulul laser KY-008 se aprinde pentru o secunda. Aceasta ofera un feedback vizual imediat, aratand exact pozitia obiectului detectat. Dupa ce laserul se stinge, servomotorul continua miscarea de scanare, creand un sistem de monitorizare continua.
Acest proiect te ajuta sa intelegi cum functioneaza senzorii cu ultrasunete, cum se controleaza un servo in miscare lineara si cum poti integra un modul laser pentru a marca vizual obstacolele. De asemenea, este un punct de plecare pentru proiecte mai complexe de orientare sau robotica.
Daca ai intrebari sau sugestii, scrie-mi la electronica@bitmi.ro. Si daca faci acest proiect, trimite-mi poze sau video. Abia astept sa vad cum l-ai personalizat!








")


